马氏距离
马氏距离(Mahalanobis distance)是由印度统计学家马哈拉诺比斯(P. C. Mahalanobis)提出的,表示点与一个分布之间的距离。它是一种有效的计算两个未知样本集的相似度的方法。与欧氏距离不同的是,它考虑到各种特性之间的联系。
- 马氏距离可以定义为两个服从同一分布并且其协方差矩阵为Σ的随机变量x与y的差异程度:

等价实现推理:
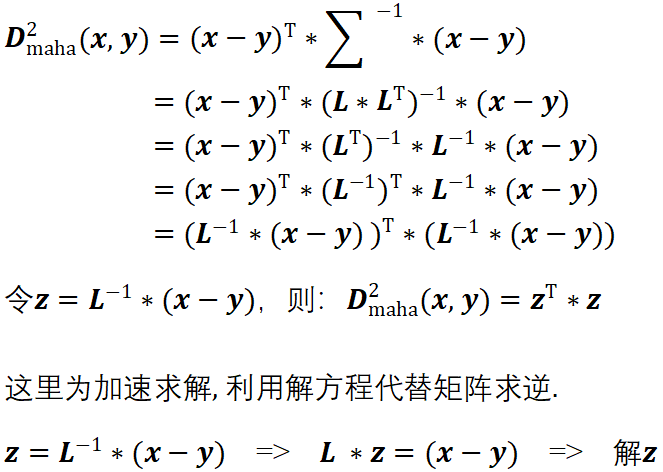
- 如果协方差矩阵为单位矩阵,马氏距离就简化为欧式距离;如果协方差矩阵为对角阵,其也可称为正规化的马氏距离。
1. 代码详解
上述马氏距离的理论部分,但是在代码实践中,原作者做了一些改进,即等价推理部分。本人在学习过程中对代码做了详细的注释,并论证了该等价过程,记录在本博客中,与大家分享。
"""
# 卡尔曼滤波分为两个阶段:预测阶段 和 更新阶段
预测阶段:根据上一时刻(t-1时刻)的后验估计值来估计当前时刻(t时刻)的先验估计值
Eq1. 状态预测公式: x^~(t) = F*x^(t-1) + B*u(t-1) + w(t-1)
或简化 x^~(t) = F*x^(t-1)
Eq2. 协方差预测公式: P~(t) = F*P(t-1)*F.T + Q
更新阶段:使用当前时刻(t时刻)的测量值来更正预测阶段估计值,得到当前时刻(t时刻)的后验估计值
Eq3. 卡尔曼增益: K(t) = P~(t)*H.T*(H*P~(t)*H.T + R).I
Eq4. 状态更新公式: x^(t) = x^(t-1) + K(t)*(z(t) - H*x^~(t))
Eq5. 协方差更新公式: P(t) = (I - K(t)*H)*P~(t)
"""
class KalmanFilter(object):
def __init__(self):
pass
# 状态、协方差 向测量空间映射
def project(self, mean, covariance):
std = [self._std_weight_position * mean[3],
self._std_weight_position * mean[3],
1e-1,
self._std_weight_position * mean[3]]
# 初始化测量过程中噪声矩阵 R, 即 innovation_cov, 该噪声矩阵与检测框的高相关 ,它是一个4x4的对角矩阵
innovation_cov = np.diag(np.square(std))
# Eq4. 状态更新公式: x^(t) = x^(t-1) + K(t)*(z(t) - H*x^~(t))
# Eq4. 中将 状态向量 映射到 测量空间 H*x^~(t)
mean = np.dot(self._update_mat, mean)
# Eq3. 卡尔曼增益: K(t) = P~(t) * H.T * (H * P~(t) * H.T + R).I
# Eq3. 中将协方差矩阵 P~(t) 映射到测量空间 H * P~(t) * H.T
covariance = np.linalg.multi_dot((self._update_mat, covariance, self._update_mat.T))
return mean, covariance + innovation_cov # H * x^(t); H * P~(t) * H.T + R
# 马氏距离
def gating_distance(self, mean, covariance, measurements, only_position=False):
mean, covariance = self.project(mean, covariance)
if only_position:
mean, covariance = mean[:2], covariance[:2, :2]
measurements = measurements[:, :2]
# 将 埃尔米特(实数即对称)正定的矩阵 分解为下/上三角矩阵
cholesky_factor = np.linalg.cholesky(covariance)
d = measurements - mean # Xi - Xj
# scipy.linalg.solve_triangular解下三角线性方程组 a*x = b 方程中的 x,(假定a是一个上/下三角矩阵)
z = scipy.linalg.solve_triangular(cholesky_factor, d.T, lower=True, check_finite=False, overwrite_b=True)
squared_maha = np.sum(z * z, axis=0) # Dmaha**2 = z.T * z = z**2, 见等价推理
return squared_maha
本文作者: 崔玉君
版权声明: 转载请注明出处!
Enjoy! ![]()
![]()
![]()
If you like TeXt, don’t forget to give me a star. ![]()

PREVIOUSYolov5-DeepSort之卡尔曼滤波